
MDR INFO, 13.03.14
–> Beitrag anhören
Auf der CeBIT in Hannover, der weltweit größten Messe zur Informationstechnik, werden auch regelmäßig ungewöhnliche oder besondere Forschungsprojekte vorgestellt. Studenten mehrerer europäischer Universitäten kümmeren sich in einem Projekt um die sogenannte Schwarmintelligenz. Mehrere Individuen können zusammen treffendere Entscheidungen fällen, als allein. Doch diese Individuen sind in diesem Fall keine Menschen.
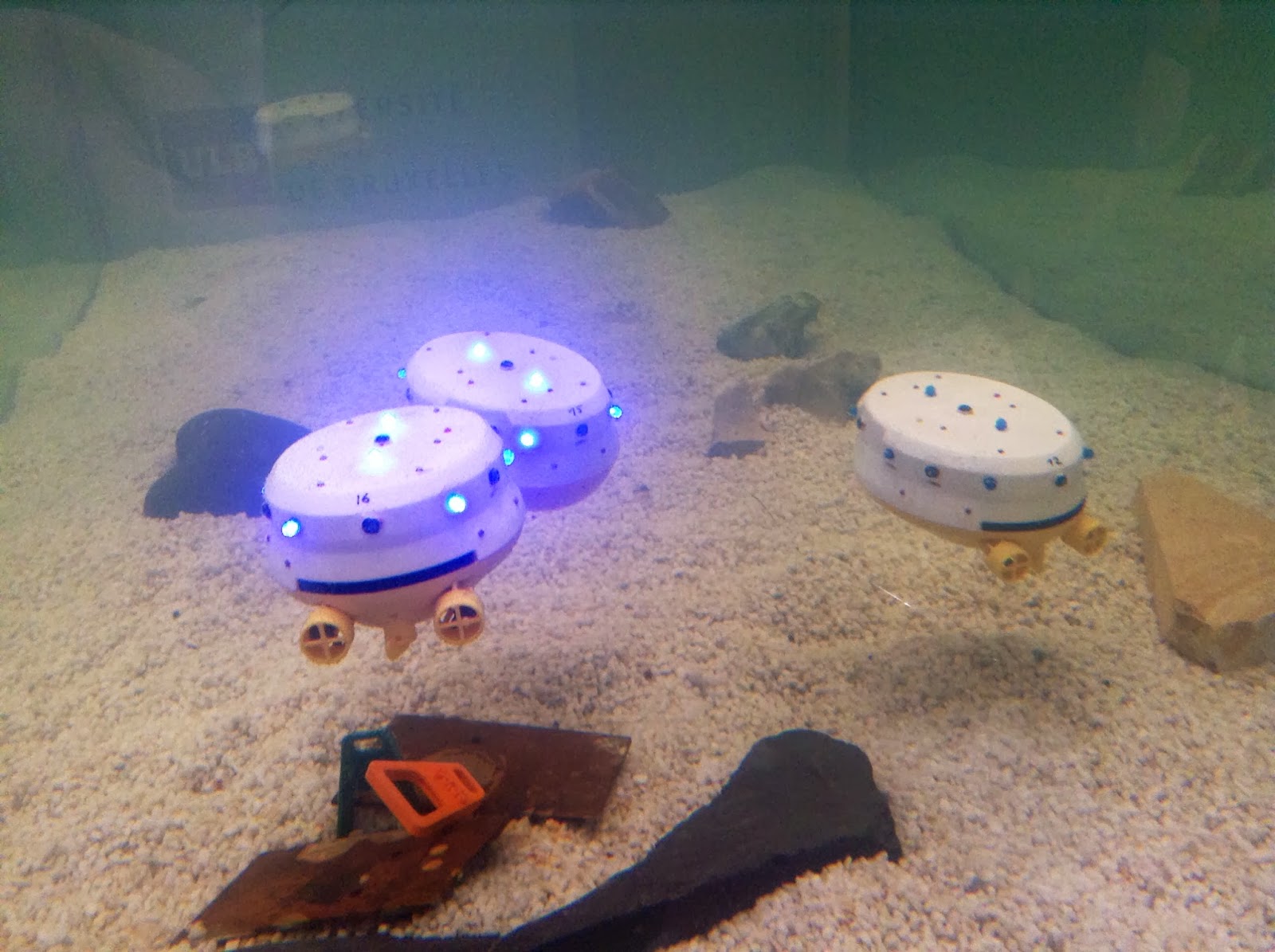 |
| Tauchroboter in einem Aquarium auf der CeBIT (Foto: Voß). |
Tobias Dipper steht vor einem großen Aquarium. Darin schweben faustgroße blinkende Kugeln. Doch der Doktorand an der Uni Stuttgart hat kein ungewöhnliches Hobby. Es ist ein ungewöhnlicher Versuch. Die Kugeln sind Tauchroboter in einer stark verkleinerten Version. Es geht darum, durch mathematische Berechnungen, sogenannte Algorithmen, ganz bestimmte Verhaltensmuster der Natur nachzuvollziehen. Die Aufgabe für die kleinen Tauchroboter ist relativ einfach. Sie sollen als Schwarm – wie beispielsweise Fische – etwas finden, sich gegenseitig informieren und das Ziel nicht aus den Augen verlieren, erklärt Tobias Dipper.
Also, dass funktioniert so, dass sich der Roboter erstmal nur zufällig in der Umgebung bewegt und, sobald er das Ziel gefunden hat, hat er die Aufgabe, stehen zu bleiben und durch das Blinken anzuzeigen: „Hab’s gefunden!“. Und die anderen Roboter, sobald sie ein Blinken sehen, blinken sie selber, um das weiterzugeben an ihre Nachbarn. Und gleichzeitig bewegen sie sich zur Quelle hin, um diese Gruppe zu sammeln an der entsprechenden Stelle.
Was zunächst wie ein Spiel aussieht, hat einen durchaus ernsten Hintergrund. Aktuelles Beispiel: die vermisste Boeing 777. Sollte sie ins Meer gestürzt sein, muss dort irgendwo die Blackbox, der Flugschreiber, liegen.
Tobias Dipper ist Doktorand
an der Uni Stuttgart und
kümmert sich um
Tauchroboter (Foto: Voß)Man weiß nur so ungefähr das Gebiet, wo der sein müsste, aber nicht genau. Man setzt dann einfach seine Roboter aus. Die suchen überall und sobald einer den gefunden hat, holt er die anderen herbei. Das hat auch den Vorteil, dass er es nicht mehr verliert, also nicht mehr abgedriftet werden kann. Sondern, wenn die Gruppe mal da ist, dann bleibt sie auch da und kann dann quasi menschlichen Tauchern oder anderen, größeren Robotern – wenn es zu tief ist, zum Beispiel – signalisieren: „Hier ist es!“

Der Vorteil des Roboterschwarms: Ähnlich wie bei Fischen oder Ameisen teilen sich die Roboter ihre Aufgaben auf, kommunizieren miteinander und – menschlich ausgedrückt – sprechen sich gegenseitig ab. Wenn ein oder mehrere Tauchroboter ausfallen, ist der Schwarm weiterhin einsatzfähig. Die Roboter denken sich dann mithilfe der Algorithmen neue Arbeitsweisen aus.
Eine größere Version der Roboter ist 30 Zentimeter lang. Die maximale Tauchtiefe liegt aber nur bei 10 Metern, ist also maximal das Hafenbecken, Tobias Dipper.
Wenn man tatsächlich ins Meer will, muss man sie ein Stück größer machen. Ich würde sagen: Ein halber Meter ist so die Größe, die man braucht im offenen Ozean. Mindestens. Aber der Vorteil ist: Der Algorithmus und die Ideen würden weiter so funktionieren. Die Sachen, die wir hier entwickeln würden eins zu eins auf eine neue Plattform übernommen werden. Da geht es nur darum, dass die Plattform größer ist, größeren Druck aushält, größere Strömungen kompensieren kann und solche Dinge.
Die Roboter lassen sich auch für das Suchen von Öllecks bei Pipelines und ähnliche Aufgaben einsetzen. Die Kosten für einen der Tauchroboter liegen bei rund 500 Euro.
Beteiligt an dem Projekt sind neben Tobias Dipper auch Studenten und Wissenschaftler aus Deutschland, Österreich, Großbritannien und Belgien. Gefördert werden sie durch Gelder der Europäischen Union.
–> weitere Informationen auf der Homepage des Projektes


